




MCP2551 CAN Protocol Controller Module
MCP2551 CAN Protocol Controller Module
SKU: CT-0053
7 in stock
- Supports 1 Mb/s operation
- Suitable for 12V and 24V systems
- Detection of ground fault (permanent Dominant) on TXD input
- Power-on Reset and voltage brown-out protection
- Low current standby operation
- Protection against high-voltage transients
- Automatic thermal shutdown protection
- Up to 112 nodes can be connected
Couldn't load pickup availability
 B2B customers can avail ₹14.49 ITC on this product.
B2B customers can avail ₹14.49 ITC on this product.
 Free Shipping over ₹1299.
Free Shipping over ₹1299.
- Safe Handling
- Faster Shipping
- Easy Return

The MCP2551 is a high-speed CAN, fault-tolerant device that serves as the interface between a CAN protocol controller and the physical bus. The MCP2551 device provides differential transmit and receive capability for the CAN protocol controller, and is fully compatible with the ISO-11898 standard, including 24V requirements. It will operate at speeds of up to 1 Mb/s. Typically, each node in a CAN system must have a device to convert the digital signals generated by a CAN controller to signals suitable for transmission over the bus cabling (differential output). It also provides a buffer between the CAN controller and the high-voltage spikes that can be generated on the CAN bus by outside sources (EMI, ESD, electrical transients, etc.).
The CAN bus has two states: Dominant and Recessive. A Dominant state occurs when the differential voltage between CANH and CANL is greater than a defined voltage (e.g.,1.2V). A Recessive state occurs when the differential voltage is less than a defined voltage (typically 0V). The Dominant and Recessive states correspond to the Low and High state of the TXD input pin, respectively. However, a Dominant state initiated by another CAN node will override a Recessive state on the CAN bus.
The RXD output pin reflects the differential bus voltage between CANH and CANL. The Low and High states of the RXD output pin correspond to the Dominant and Recessive states of the CAN bus, respectively.
Features:
- Supports 1 Mb/s operation
- Implements ISO-11898 standard physical layer requirements
- Suitable for 12V and 24V systems
- Externally-controlled slope for reduced RFI emissions
- Detection of ground fault (permanent Dominant) on TXD input
- Power-on Reset and voltage brown-out protection
- An unpowered node or brown-out event will not disturb the CAN bus
- Low current standby operation
- Protection against damage due to short-circuit conditions (positive or negative battery voltage)
- Protection against high-voltage transients
- Automatic thermal shutdown protection
- Up to 112 nodes can be connected
- High-noise immunity due to differential bus implementation
- Temperature ranges: - Industrial (I): -40°C to +85°C - Extended (E): -40°C to +125°C
| Model | MCP2551 |
| Operating voltage | 3 ~ 5V |
| Communication Interface | CAN |
| Working temperature | -40 to 125 |
| Product Dimensions | 19 x 16 x 3mm |
| Product Weight | 5 grams |

Country of origin : China
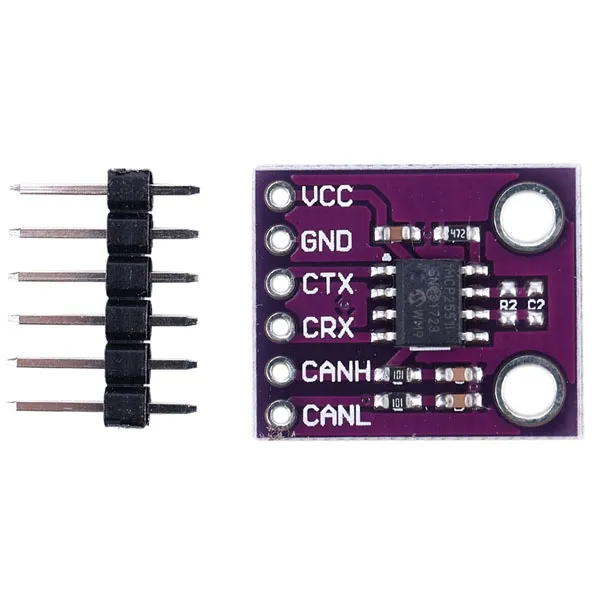
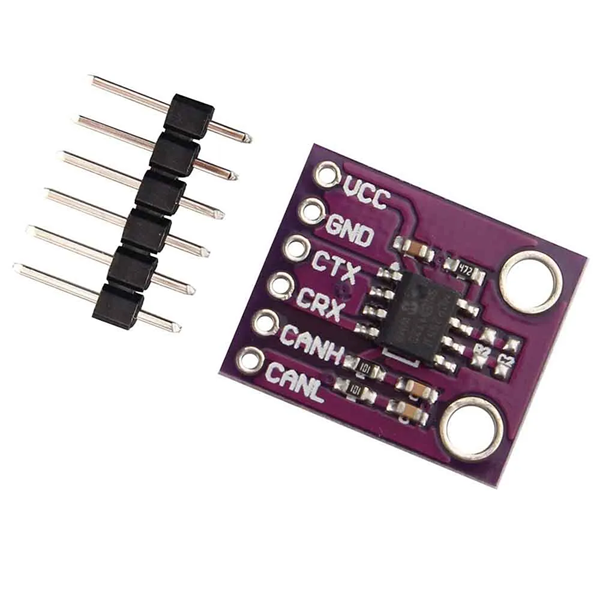
Note: If the pins are not soldered, they will be provided in the package.
|
Pin
|
Function
|
| Vcc | 3.3 - 5V |
| Gnd | Ground |
| CTX | Connects to the CAN TX of MCU |
| CRX | Connects to the CAN RX of MCU |
| CANH | Connects to the CANH of another module |
| CANL | Connects to the CANL of another module |