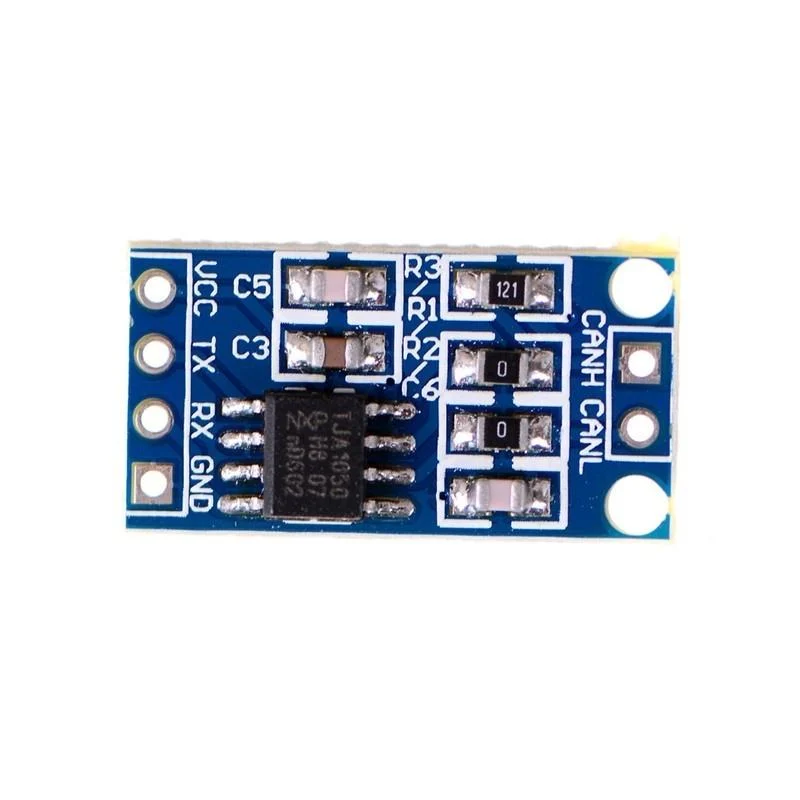
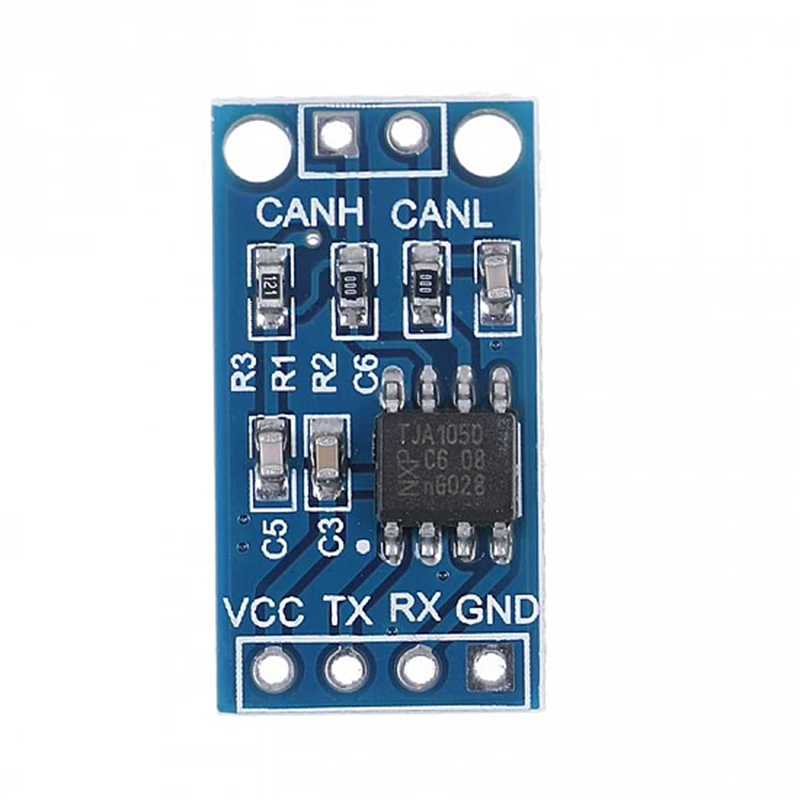
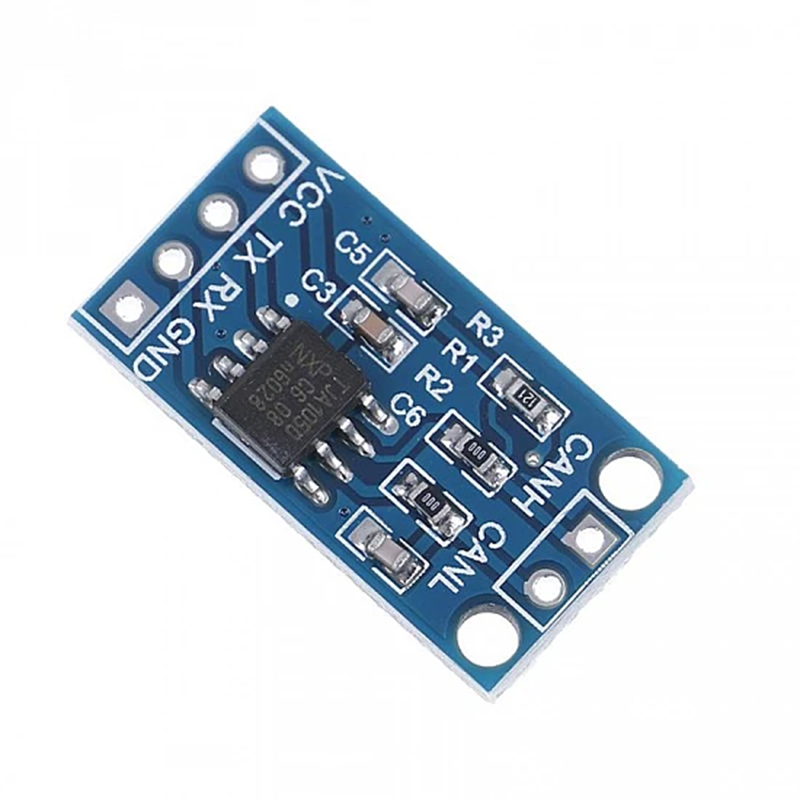
TJA1050 CAN Controller Module
TJA1050 CAN Controller Module
SKU: CT-0054
12 in stock
- High speed (up to 1 Mbaud)
- Very low ElectroMagnetic Emission (EME)
- Transmit Data (TXD) dominant time-out function
- Silent mode in which the transmitter is disabled
- Input levels compatible with 3.3 V and 5 V devices
- Short-circuit proof to battery and to ground
- At least 110 nodes can be connected.
Couldn't load pickup availability
 B2B customers can avail ₹12.20 ITC on this product.
B2B customers can avail ₹12.20 ITC on this product.
 Free Shipping over ₹1299.
Free Shipping over ₹1299.
- Safe Handling
- Faster Shipping
- Easy Return
The TJA1050 is the interface between the CAN protocol controller and the physical bus. It is primarily intended for high-speed automotive applications using baud rates from 60 kbaud up to 1 Mbaud. It provides differential transmit capability to the bus and differential receiver capability to the CAN protocol controller.
A current-limiting circuit protects the transmitter output stage from damage caused by accidental short-circuit to either positive or negative supply voltage, although power dissipation increases during this fault condition.
The high-speed mode is the normal operating mode and is selected by connecting pin S to ground. It is the default mode if pin S is not connected. However, to ensure EMI performance in applications using only the high-speed mode, it is recommended that pin S is connected to ground. In the silent mode, the transmitter is disabled. All other IC functions continue to operate. The silent mode is selected by connecting pin S to VCC and can be used to prevent network communication from being blocked, due to a CAN controller which is out of control.
Features:
- High speed (up to 1 Mbaud)
- Very low ElectroMagnetic Emission (EME)
- An unpowered node does not disturb the bus lines
- Transmit Data (TXD) dominant time-out function
- Silent mode in which the transmitter is disabled
- Bus pins protected against transients in an automotive environment
- Input levels compatible with 3.3 V and 5 V devices
- Short-circuit proof to battery and to ground
- At least 110 nodes can be connected.
- Fully compatible with the ISO 11898 standard
- Suitable for use in nodes that are in a power-down situation in partially powered networks